Haben Sie schon einmal etwas aus den Händen verloren, das Ihnen ins Schwimmbecken oder schlimmer noch in die Toilette gefallen ist?
Wissenschaftler haben vielleicht eine Lösung entwickelt, um Unterwasserobjekte festzuhalten, aber sie ist nicht in erster Linie dazu gedacht, Ihnen zu helfen, Ihr iPhone vor einem wässrigen Schicksal zu retten.
Forscher der Virginia Tech haben einen Handschuh entwickelt, der es Tauchern ermöglicht, einen festen Griff zu bekommen, während sie beispielsweise jemanden retten oder ein Schiffswrack bergen.
Der „Octa-Handschuh“ ist von Krakententakeln inspiriert und mit Robotersaugern bedeckt, die mit Sensoren ausgestattet sind, die erkennen können, wie weit ein Objekt entfernt ist.
Wenn die Sensoren eine nahe gelegene Oberfläche erkennen, sendet sie ein Signal an die Steuerung, die die Haftung des Saugnapfs aktiviert.
Die Forscher hoffen, dass der Handschuh für Unterwasseroperationen verwendet werden kann, bei denen eine feine Berührung erforderlich ist.

Forscher der Virginia Tech haben einen Handschuh entwickelt, der es Tauchern ermöglicht, einen festen Griff zu bekommen, während sie beispielsweise jemanden retten oder ein Schiffswrack bergen. Abgebildet ist der Octa-Handschuh, der eine Spielkarte von Virginia Tech unter Wasser aufhebt

Die Saugnäpfe des Handschuhs wurden entwickelt, um mit nur leichtem Druck an flachen, gekrümmten, glatten und rauen Oberflächen von Objekten unterschiedlicher Form und Größe zu haften – genau wie ein Oktopus

Ein Oktopus hat acht lange Arme, die in der Lage sind, Gegenstände jeder Art von Oberfläche in einer aquatischen Umgebung zu ergreifen, was die Inspiration für den Octa-Handschuh war
Menschen sind von Natur aus nicht dafür ausgestattet, unter Wasser zu arbeiten, weshalb Schutzbrillen und Neoprenanzüge erfunden wurden, und unsere rutschige Haut ist keine Ausnahme.
Rettungstaucher, Unterwasserarchäologen, Brückeningenieure und Bergungsmannschaften verlassen sich alle darauf, dass sie einen guten Halt haben, um ihre Arbeit zu erledigen.
Es ist jedoch manchmal notwendig, den Griff fester zu greifen, um die Schlüpfrigkeit zu kompensieren, die die Operation beeinträchtigen kann.
Michael Bartlett, Assistenzprofessor für Maschinenbau, sagte: „Es gibt kritische Zeiten, in denen dies zu einer Belastung wird.
„Die Natur hat bereits einige großartige Lösungen, also suchte unser Team in der natürlichen Welt nach Ideen.
“Der Tintenfisch wurde zu einer offensichtlichen Wahl für die Inspiration.”
Ein Oktopus hat acht lange Arme, die in der Lage sind, Gegenstände jeder Art von Oberfläche in einer aquatischen Umgebung zu ergreifen.
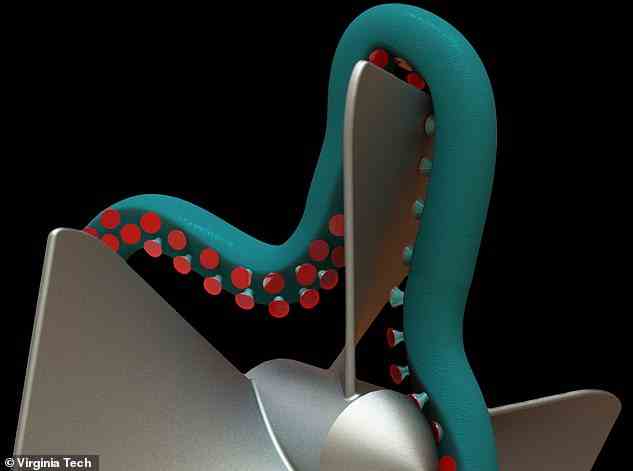
Die Arme sind mit Saugnäpfen bedeckt, die wie das Ende eines Kolbens geformt sind und von den Muskel- und Nervensystemen des Meerestiers gesteuert werden.
Nachdem der breite äußere Rand des Saugnapfs mit einem Objekt versiegelt ist, kann der Tintenfisch seine Muskeln verwenden, um den schalenförmigen Bereich hinter dem Rand zusammenzuziehen oder zu entspannen, um Druck hinzuzufügen oder abzulassen.
Wenn viele der Saugnäpfe in Eingriff sind, entsteht eine starke Klebeverbindung, die sich nur schwer lösen lässt.
„Wenn wir uns den Oktopus ansehen, sticht der Klebstoff auf jeden Fall hervor, der die Haftung bei Bedarf schnell aktiviert und löst“, sagte Bartlett.
„Ebenso interessant ist jedoch, dass der Oktopus über 2.000 Saugnäpfe in acht Armen steuert, indem er Informationen von verschiedenen chemischen und mechanischen Sensoren verarbeitet.
“Der Oktopus bringt Adhäsion, Sensorik und Kontrolle wirklich zusammen, um Unterwasserobjekte zu manipulieren.”
Nachdem der breite äußere Rand seines Saugnapfs mit einem Objekt versiegelt ist, kann der Tintenfisch seine Muskeln verwenden, um den schalenförmigen Bereich hinter dem Rand zusammenzuziehen oder zu entspannen, um Druck hinzuzufügen oder abzulassen
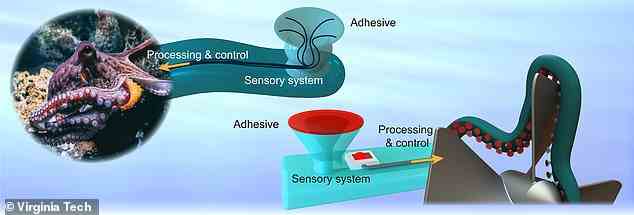
Illustration eines Oktopus-Klebesystems und des sensorisierten, Oktopus-inspirierten Klebesystems. Letzteres ist mit der Verarbeitung und Steuerung integriert, um Objekte zu erfassen
Saugnäpfe und Sensoren wurden dem Handschuh hinzugefügt und über einen Mikrocontroller verbunden, wodurch das Nerven- und Muskelsystem eines Oktopus nachgeahmt wurde. Die Saugnäpfe haften, wenn sie ein Objekt in der Nähe spüren, und somit ist vom Handschuhbenutzer keine Anstrengung erforderlich
Das Team im Soft Materials and Structures Lab entwickelte eigene Saugnäpfe mit nachgiebigen Gummistielen, die mit weichen Membranen bedeckt waren.
Ihre Methode wurde heute in der Fachzeitschrift Science Advances veröffentlicht.
Die Saugnäpfe wurden entwickelt, um mit nur leichtem Druck an flachen, gekrümmten, glatten und rauen Oberflächen von Objekten unterschiedlicher Form und Größe zu haften – genau wie ein Oktopus in freier Wildbahn.
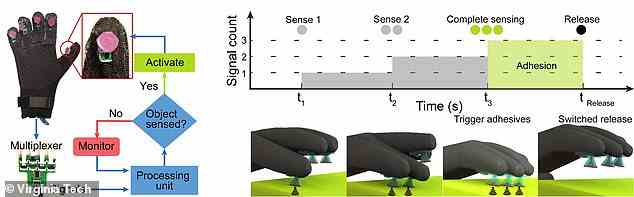
Eric Markvicka von der University of Nebraska-Lincoln fügte dann eine Reihe optischer Mikro-LIDAR-Näherungssensoren hinzu, die erkennen, wie nahe ein Objekt ist.
Die Saugnäpfe und LIDAR-Sensoren wurden dann über einen Mikrocontroller verbunden, wodurch das Nerven- und Muskelsystem eines Oktopus nachgeahmt wurde.
„Durch die Verschmelzung weicher, reaktionsfähiger Klebematerialien mit eingebetteter Elektronik können wir Objekte greifen, ohne sie zusammendrücken zu müssen“, sagte Bartlett.
„Es macht den Umgang mit nassen oder Unterwasserobjekten viel einfacher und natürlicher. Die Elektronik kann die Haftung schnell aktivieren und lösen.
„Bewegen Sie einfach Ihre Hand auf ein Objekt zu, und der Handschuh erledigt die Arbeit zum Greifen.
‘Das alles kann erledigt werden, ohne dass der Benutzer eine einzige Taste drückt.’

Nachdem die Saugnäpfe an einem Handschuh befestigt waren, testeten die Ingenieure sie mit nur einem Sensor an empfindlichen und leichten Objekten

Die Ingenieure stellten fest, dass der Handschuh flache Gegenstände, Metallspielzeug, Zylinder, den doppelt gekrümmten Teil eines Löffels und einen ultraweichen Hydrogelball schnell aufnehmen und wieder freigeben konnte.
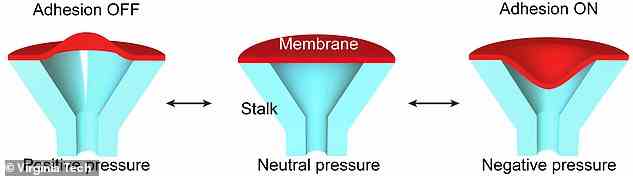
Diagramme, die die verschiedenen Zustände der Klebemembran zeigen, die die Haftung von einem “Aus”- in einen “An”-Zustand steuert
Nachdem die Saugnäpfe an einem Handschuh befestigt waren, testeten die Ingenieure sie mit nur einem Sensor an empfindlichen und leichten Objekten.
Sie fanden heraus, dass sie flache Gegenstände, Metallspielzeug, Zylinder, den doppelt gekrümmten Teil eines Löffels und einen ultraweichen Hydrogelball schnell aufnehmen und loslassen konnten.
Nachdem das Sensornetzwerk neu konfiguriert wurde, um alle Sensoren für die Objekterkennung zu nutzen, konnten die Handschuhe auch größere Objekte wie einen Teller, eine Schachtel und eine Schüssel greifen.
Flache, zylindrische, konvexe und kugelförmige Objekte, die sowohl aus harten als auch aus weichen Materialien bestanden, wurden geklebt und angehoben, selbst wenn Benutzer das Objekt nicht durch Schließen ihrer Hände ergriffen.
Der Postdoktorand Ravi Tutika sagte: „Diese Fähigkeiten ahmen die fortschrittliche Manipulation, Erfassung und Steuerung von Kopffüßern nach und bieten eine Plattform für synthetische Unterwasser-Klebehäute, die verschiedene Unterwasserobjekte zuverlässig manipulieren können.
“Dies ist sicherlich ein Schritt in die richtige Richtung, aber wir müssen noch viel über den Oktopus und die Herstellung integrierter Klebstoffe lernen, bevor wir die volle Greiffähigkeit der Natur erreichen.”
Die Forscher hoffen, dass der Handschuh in Zukunft eine Rolle in der Unterwasser-Greifrobotik, in benutzergestützten Technologien, im Gesundheitswesen und in der Herstellung von nassen Objekten spielen wird.