Inspiriert davon, wie Ameisen sich durch enge Räume bewegen, indem sie ihre Beine verkürzen, haben Wissenschaftler einen Roboter gebaut, der seine Gliedmaßen einzieht, um durch enge Passagen zu navigieren.
Der Roboter konnte sich bücken und schnell durch Passagen gehen, die schmaler und kürzer waren als er selbst, berichteten Forscher am 20. Januar in Fortschrittliches intelligentes SystemS. Es konnte auch über Stufen klettern und sich auf Gras, losem Gestein, Mulch und zerkleinertem Granit fortbewegen.
Diese Allgemeingültigkeit und Anpassungsfähigkeit sind die größten Herausforderungen bei der Fortbewegung von Robotern mit Beinen, sagt der Robotikingenieur Feifei Qian, der nicht an der Studie beteiligt war. Einige Roboter haben spezialisierte Gliedmaßen, um sich über ein bestimmtes Gelände zu bewegen, aber sie können sich nicht in enge Räume quetschen (SN: 16.01.19).
Science News-Schlagzeilen in Ihrem Posteingang
Schlagzeilen und Zusammenfassungen der neuesten Science News-Artikel, die jeden Donnerstag an Ihren E-Mail-Posteingang gesendet werden.
Danke fürs Anmelden!
Bei der Anmeldung ist ein Problem aufgetreten.
„Ein Design, das sich an eine Vielzahl von Umgebungen mit unterschiedlichen Maßstäben oder Steifigkeiten anpassen kann, ist viel schwieriger, da Kompromisse zwischen den verschiedenen Umgebungen berücksichtigt werden müssen“, sagt Qian von der University of Southern California in Los Angeles.
Als Inspiration wandten sich die Forscher in der neuen Studie an Ameisen. „Insekten sind wirklich eine nette Inspiration für die Entwicklung von Robotersystemen, die nur minimale Betätigung haben, aber eine Vielzahl von Fortbewegungsverhalten ausführen können“, sagt Nick Gravish, Robotiker an der University of California, San Diego (SN: 16.08.18). Ameisen passen ihre Körperhaltung an, um durch winzige Zwischenräume zu kriechen. Und sie lassen sich nicht durch unebenes Gelände oder kleine Hindernisse aus der Ruhe bringen. Zum Beispiel brechen ihre Beine ein wenig zusammen, wenn sie auf einen Gegenstand treffen, sagt Gravish, und die Ameisen bewegen sich schnell weiter.
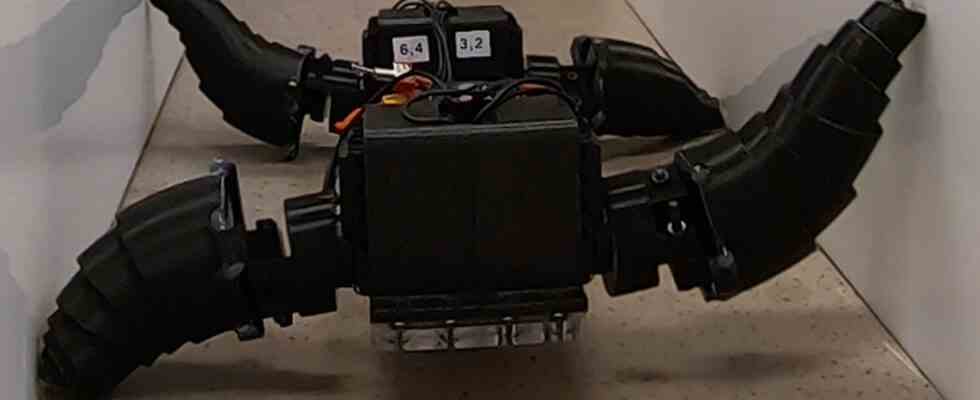
Gravish und Kollegen bauten einen kurzen, stämmigen Roboter – etwa 30 Zentimeter breit und 20 Zentimeter lang – mit vier wellenförmigen, teleskopierbaren Gliedmaßen. Jeder Schenkel besteht aus sechs ineinander verschachtelten konzentrischen Rohren, die ineinander gezogen werden können. Darüber hinaus müssen die Gliedmaßen nicht aktiv angetrieben oder angepasst werden, um ihre Gesamtlänge zu ändern. Stattdessen ermöglichen Federn, die die Beinsegmente verbinden, automatisch, dass sich die Beine zusammenziehen, wenn der Roboter durch einen engen Raum navigiert, und sich in einem offenen Raum wieder ausstrecken. Das Ziel war, mechanisch intelligente Strukturen statt algorithmisch intelligenter Roboter zu bauen.
„Es ist wahrscheinlich schneller als aktive Kontrolle, [which] erfordert, dass der Roboter zuerst den Kontakt mit der Umgebung wahrnimmt, die geeignete Aktion berechnet und dann den Befehl an seine Motoren sendet“, sagt Qian über diese Beine. Das Entfernen der Sensor- und Rechenkomponenten kann die Roboter auch klein, billig und weniger energiehungrig machen.
Der Roboter könnte seine Körperbreite und -höhe modifizieren, um einen größeren Bereich von Körpergrößen als andere ähnliche Roboter zu erreichen. Die Beinsegmente zogen sich zusammen, um den Roboter durch kleine Tunnel wackeln zu lassen, und breiteten sich aus, wenn er sich unter niedrigen Decken befand. Diese Anpassungsfähigkeit ließ den Roboter in Räume quetschen, die nur 72 Prozent seiner vollen Breite und 68 Prozent seiner vollen Höhe ausmachten.
Als nächstes planen die Forscher, die Steifigkeit der Federn, die die Beinsegmente verbinden, aktiv zu steuern, um die Bewegung an den Geländetyp anzupassen, ohne zu viel Kraft zu verbrauchen. „Auf diese Weise können Sie Ihr Bein lang halten, wenn Sie sich auf offenem Gelände oder über hohe Objekte bewegen, aber dann auf engstem Raum auf die kleinstmögliche Form zusammenbrechen“, sagt Gravish.
Abonnieren Sie Science News
Holen Sie sich großartigen Wissenschaftsjournalismus von der vertrauenswürdigsten Quelle direkt an Ihre Haustür.
Solche kleinen, minimalen Roboter sind einfach herzustellen und können schnell angepasst werden, um komplexe Umgebungen zu erkunden. Obwohl diese Roboter in der Lage sind, über verschiedene Terrains zu gehen, sind sie derzeit zu zerbrechlich für Such- und Rettungszwecke, Erkundungen oder biologische Überwachung, sagt Gravish.
Der neue Roboter kommt diesen Zielen einen Schritt näher, aber um dorthin zu gelangen, braucht es mehr als nur Robotik, sagt Qian. „Um diese Anwendungen tatsächlich zu erreichen, wäre eine Integration von Design, Steuerung, Sensorik, Planung und Hardware-Fortschritt erforderlich.“
Aber das ist nicht Gravishs Interesse. Stattdessen möchte er diese Experimente mit dem verbinden, was ursprünglich bei den Ameisen beobachtet wurde, und die Roboter verwenden, um weitere Fragen zu den Regeln der Fortbewegung in der Natur zu stellen (SN: 16.01.20).
„Ich würde wirklich gerne verstehen, wie sich kleine Insekten so schnell über ein bestimmtes unvorhersehbares Gelände bewegen können“, sagt er. „Was ist das Besondere an ihren Gliedmaßen, dass sie sich so schnell bewegen können?“