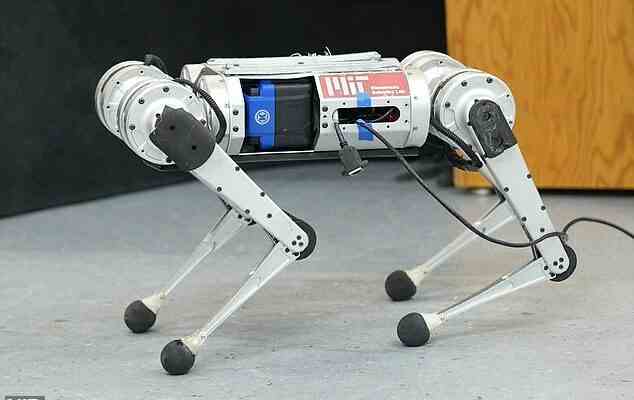
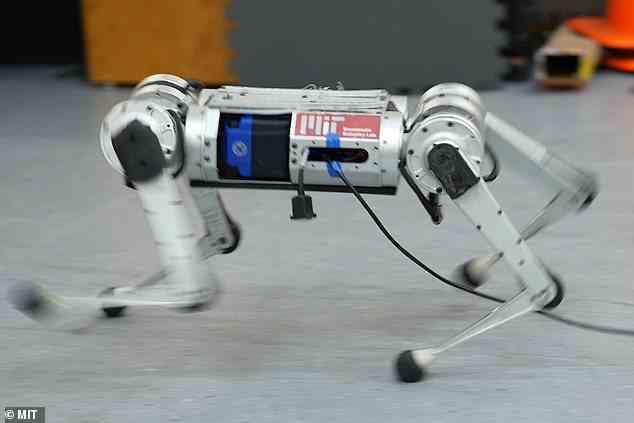
Dieser vierbeinige Roboter-„Gepard“ rast mit einer Geschwindigkeit von bis zu 15 km/h über den Boden und bringt Sie mit Sicherheit zum Springen.
Es wurde von Ingenieuren am MIT entwickelt und kann sogar Eis und Kies schnell überqueren.
Als „praktisch unzerstörbar“ angepriesen, sagten sie, es habe gelernt, wie man durch Versuch und Irrtum über eine Reihe von verschiedenen Terrains rast, ähnlich wie Menschen es lernen.
Dank moderner simulierter Technologie, sagten die Forscher, konnte ihr Mini-Geparden-Roboter in nur drei Stunden tatsächlicher Zeit 100 Tage Erfahrung auf verschiedenen Böden sammeln.
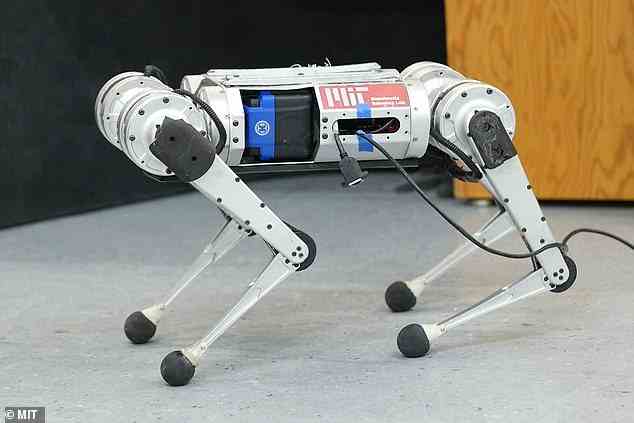
Dieser vierbeinige Roboter-„Gepard“ rast mit einer Geschwindigkeit von bis zu 15 km/h über den Boden und bringt Sie mit Sicherheit zum Springen
Es wurde von Ingenieuren am MIT entwickelt und kann sogar Eis und Kies schnell überqueren

Als “praktisch unzerstörbar” bezeichnet, sagten sie, es habe durch Versuch und Irrtum gelernt, wie man eine Reihe von Terrains überquert
Es ist fast 25 Jahre her, seit die ersten Robotertiere geschaffen wurden, und seitdem haben Wissenschaftler auf der ganzen Welt unter anderem Beispiele von Lauf-, Tanz- und Türöffnungsmaschinen enthüllt.
Einer der berühmtesten ist der Mini-Robo-Hund Spot von Boston Dynamics, der letztes Jahr gefilmt wurde, als er einen hoch choreografierten Tanz zur Musik der südkoreanischen K-Pop-Sensation BTS aufführte.
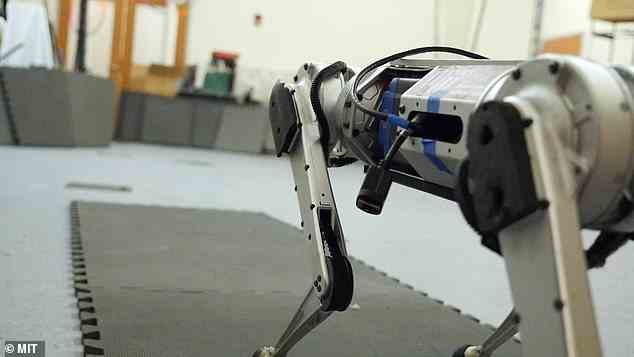
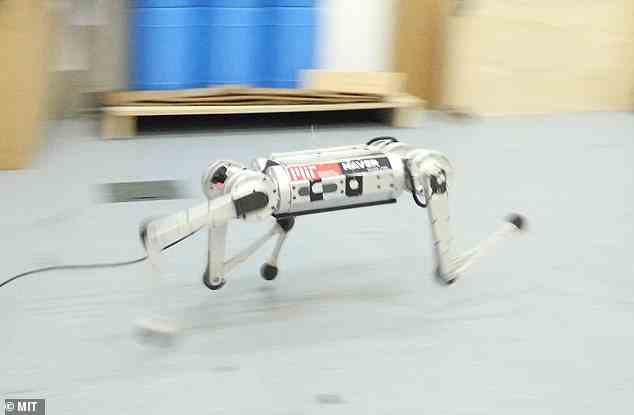
Aber wenn es um einen laufenden Roboter geht, wie die MIT-Forscher erklären, kann es ziemlich schwierig sein, ihn für tückisches Gelände zu programmieren.
“Wir haben einen Ansatz entwickelt, durch den sich das Verhalten des Roboters durch simulierte Erfahrung verbessert, und unser Ansatz ermöglicht entscheidend auch den erfolgreichen Einsatz dieser erlernten Verhaltensweisen in der realen Welt”, sagte der leitende Forscher Gabriel Margolis.
„Von allen Umgebungen, die er in diesem Simulator sieht, werden einige die Roboterfähigkeiten lehren, die in der realen Welt nützlich sind. Wenn wir in der realen Welt arbeiten, identifiziert unser Controller die relevanten Fähigkeiten in Echtzeit und führt sie aus.’
Auf die Frage, warum es viel schwieriger sei, einen Roboter zum Laufen anstatt zum Gehen zu bringen, fügte er hinzu: „Um ein schnelles Laufen zu erreichen, muss die Hardware an ihre Grenzen gebracht werden.
„Der Roboter muss schnell auf Veränderungen in der Umgebung reagieren, beispielsweise wenn er beim Laufen auf Gras auf Eis trifft.

Wenn es um einen laufenden Roboter geht, wie die MIT-Forscher erklären, kann es ziemlich schwierig sein, ihn für tückisches Gelände zu programmieren

Dank moderner simulierter Technologie, sagten die Forscher, konnte ihr Mini-Geparden-Roboter in nur drei Stunden tatsächlicher Zeit 100 Tage Erfahrung auf verschiedenen Böden sammeln
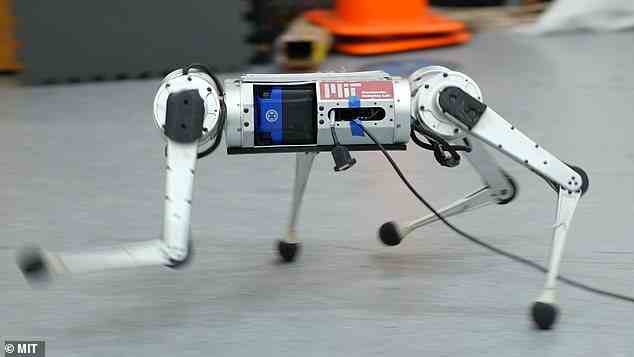
Die Forscher sagten, dass ihr spezielles Lernsystem so erfolgreich war, dass der Roboter den Rekord für den schnellsten Lauf gebrochen hatte, der für seine spezifische Plattform aufgezeichnet wurde
„Menschen rennen auf Gras schnell und werden auf Eis langsamer – wir passen uns an.
“Um Robotern eine ähnliche Anpassungsfähigkeit zu verleihen, müssen Geländeänderungen schnell erkannt und schnell angepasst werden, um zu verhindern, dass der Roboter umfällt.”
Mitautor Ge Yang fügte hinzu: „Zu programmieren, wie ein Roboter in jeder möglichen Situation handeln soll, ist einfach sehr schwierig.
„Der Prozess ist langwierig, denn wenn ein Roboter auf einem bestimmten Terrain ausfallen würde, müsste ein menschlicher Ingenieur die Fehlerursache identifizieren und die Robotersteuerung manuell anpassen, und dieser Prozess kann viel menschliche Zeit in Anspruch nehmen.
„Lernen durch Versuch und Irrtum macht es überflüssig, dass ein Mensch genau vorgeben muss, wie sich der Roboter in jeder Situation verhalten soll.“
Die Forscher sagten, dass ihr spezielles Lernsystem so erfolgreich war, dass der Roboter den Rekord für den schnellsten Lauf gebrochen hatte, der für seine spezifische Plattform aufgezeichnet wurde.
Der bisherige Hochgeschwindigkeitsrekord wurde 2019 vom Biomimetic Robotics Laboratory am MIT aufgestellt, als Wissenschaftler eine Höchstgeschwindigkeit von 8,2 mph (3,7 m/s) erreichten. Der neueste Mini-Gepardenroboter erreichte mehr als 3,9 m/s (8,7 mph)
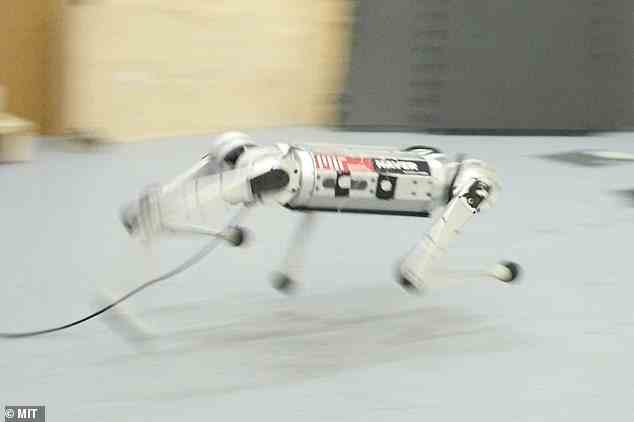
Der Roboter der MIT-Ingenieure wurde dabei gefilmt, wie er mit einer Geschwindigkeit von bis zu 15 km/h herumhuschte
Auf die Frage, warum es viel schwieriger sei, einen Roboter zum Laufen anstatt zum Gehen zu bringen, sagten die Forscher: „Um schnell laufen zu können, muss die Hardware an ihre Grenzen gebracht werden.“
Der bisherige Hochgeschwindigkeitsrekord wurde 2019 vom Biomimetic Robotics Laboratory am MIT aufgestellt, als Wissenschaftler eine Höchstgeschwindigkeit von 8,2 mph (3,7 m/s) erreichten.
Im Vergleich dazu erreichte der neueste Mini-Gepardenroboter mehr als 3,9 m/s (8,7 mph).
“Das Entwerfen von Steuerungen für agile Fortbewegungsmanöver wie Sprinten und schnelles Wenden mit Beinrobotern ist eine Herausforderung”, schreiben die Autoren in ihrem Artikel.
„Solche Aufgaben erfordern große Drehmomente, um Bodenkräfte aufzubringen und den Körper bei hoher Geschwindigkeit zu steuern, was sowohl den Sensor- als auch den Betätigungsstapel in der Roboterhardware an ihre Grenzen bringt.
„Wir demonstrieren Rekordagilität für den Mini Cheetah und erreichen Geschwindigkeiten von bis zu 3,9 m/s.“
Die Forscher bauen derzeit weitere der preiswerten vierbeinigen Maschinen und streben einen Satz von 10 an, von denen sie hoffen, jede davon an andere Labore ausleihen zu können.